How Ethan Gao ’26 Innovates
Ethan Gao ’26 has always been a designer. Peddie gave him a place and a method to bring his engineering to the next level.
by Ethan Gao ’26
Early in freshman year, I sat in the Izzo Design Lab assembling a swerve module for our FRC Robotics Team. The bearing assemblies, motor mounts, and gear housings clicked together satisfyingly. Within an hour, we had a working drivetrain component, but something felt off. The module was already designed, and we were just following instructions. Robotics competitions reward reliability, so using commercial parts makes sense. But I kept thinking: How did someone actually design this thing? Why was every bearing placed exactly where it was? Why were recesses machined on some surfaces?
The gap between observing something and understanding it is what most of my time at Peddie has been spent trying to close. I’ve been making things since elementary school: paper-and-glue structures, a small electronics and optics online store, a 3D printer I worked to exhaustion during COVID. By the time I arrived at Peddie, I’d built a lot, but chaotically, chasing whatever seemed cool to me online without real methods.
Peddie gave me a method. After that swerve module assembly, I downloaded the digital (CAD) model and started studying it. I examined each component until I understood why every bearing, fastener, and recess existed. Once the logic was clear, I tried designing my own version with a larger wheel diameter for potential rough terrain. I printed it that summer on a five-year-old printer with a friend, and we taught ourselves Arduino programming and power electronics along the way.
Junior year, Mrs. Montgomery’s calculus class gave me something new. She loved showing all the math hidden in the world, and once described a layered plywood bench in an airport that looked like a three-dimensional Riemann sum. When we encountered the first fundamental theorem of calculus, I remembered a video about machines that predicted tides and calculated ballistic trajectories during both world wars using only gears and shafts. Most modern recreations add electronics, but that felt like it defeated the point. I wanted a purely mechanical version, a machine that computes integrals with a hand crank.
The machine uses a spinning disc and a movable arm. Where the arm sits on the disc sets the gear ratio, so the output spins faster or slower depending on the input function’s value at that point. A pen traces the accumulated result. The engineering challenges were getting the disc to transmit rotation in one direction while sliding freely in the other, and dealing with the fact that converting between rotational and linear motion introduces π, which gear ratios can’t represent exactly. I used two compensating reductions that overshoot in opposite directions.
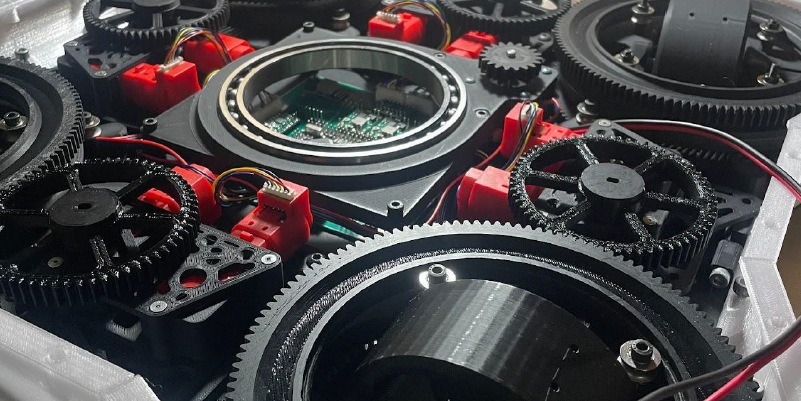
Around the same time, I returned to swerve drives. That freshman assembly experience had never fully left my mind, and now I understood enough to go further. A standard swerve module uses separate motors for driving and steering. A differential swerve uses the sum and difference of two motors to do both simultaneously. It has incredible part density and is more elegant, but the kinematics and gear trains are significantly more complex. I wanted to build a full four-module omnidirectional platform with a rotating turret on top.
Cost was a constraint. The Engineering Design III budget was generous but couldn’t exceed $200. I used cheap U-groove bearings, 3D-printed everything that could be 3D printed, and designed the whole chassis so the modules snap in on dovetail joints. Over 70 moving parts fit into a profile under 60mm thick. The electronics forced me to learn PCB design. Wiring eight motors, eight encoders, a turret stepper, WiFi, and four different voltages by hand would have meant over 300 jumper cables, so I designed a board instead. The turret rotates continuously on a slip ring so cables never tangle.
Senior year, I started the biggest version of this same pattern. A recent college grad named Joshua Bird, working out of an apartment in Hong Kong, had built a four-axis 3D printer with a $120 Ender-2 printer. I studied his design and his slicing algorithm, understood the principles, and then extended it to five axes. Standard 3D printers build layer by layer, so any surface that hangs too far over the previous layer needs something called a temporary support structure underneath. An estimated 20 to 30 percent of all printing material gets wasted this way, but if the print bed can tilt while printing, every new layer deposits onto stable ground, making supports unnecessary.
Going from four axes to five meant redoing the entire algorithm. Bird’s slicer could only tilt in one plane. I first figured out how to reorient every region of the model during printing, mathematically “bending” it so overhangs become printable, slicing it flat, then “unbending” the toolpath. The math got significantly harder, and since no five-axis printer firmware exists, I wrote my own too.
The printer works. It eliminates supports entirely for certain model geometries, and seeing it print curved, unsupported layers for the first time was incredible. The project reached over 125,000, a group of undergraduates at Rose-Hulman built their own version from my design, and I explored directions with the original 4 axis designer, Joshua Bird. I wrote a 17-page paper on the new hardware and software combo, and university professors and maker communities reached out to discuss. It’s still the project I’m actively developing.
To learn by doing is a popular maxim now, but the most important step is still just taking initiative, and the “doing” only works when the learning is forced by something unforeseen, like a mechanism not behaving as expected. The integrator’s gear ratio problem sent me to Desmos at midnight because the output pen was drifting and I needed to know why. That urgency can’t come from a syllabus. Peddie supported that process at every stage, first channeling a chaotic builder toward something specific on the robotics team, to teaching me planning and CAD in Engineering Design, to eventually giving me free reign in the lab to pursue whatever I wanted to make. The amount of freedom I was allowed was pretty incredible, and it’s the reason most of these projects exist.